Newton’s second law of motion states that the rate of change of linear momentum of a body is directly proportional to the external force applied on the body, and this change takes place always in the direction of the applied force.

Explanation
Newton’s second law of motion means that when a bigger force is applied to a body, its linear momentum changes faster and vice-versa. The momentum will change in the direction of the applied force. To understand it further, suppose
- $m =$ mass of a body,
- $\vec{v} =$ velocity of the body
The linear momentum of the body
$ \vec{p} = m\vec{v} \quad \text{…(1)} $
Let $\vec{F}$ = external force applied on the body in the direction of motion of the body.
$d\vec{p}$ = a small change in linear momentum of the body in a small time $dt$
Rate of change of linear momentum of the body $ \displaystyle =\dfrac{{d\vec{p}}}{{dt}}$
According to Newton’s second law,
$ \displaystyle \dfrac{{d\vec{p}}}{{dt}}\propto \vec{F}\quad \text{or}\quad \vec{F}=k\dfrac{{d\vec{p}}}{{dt}}\quad …\text{(2)}$
where $k$ is a constant of proportionality.
Using (1),
$ \vec{F} = k \dfrac{d}{dt}(m\vec{v}) = k m \dfrac{d\vec{v}}{dt} $
But $ \vec{a} = \dfrac{d\vec{v}}{dt} $ represents acceleration of the body.
$ \therefore \vec{F} = k m \vec{a} \quad \text{…(3)} $
The value of the constant of proportionality $k$ depends on the units adopted for measuring the force. Both in SI and c.g.s. systems, the unit of force is so chosen in such a manner that it makes $k = 1$.
Putting this value of $k$ in (3), we get
$ \displaystyle \vec{F}=m\vec{a}\text{ }…\text{ (4)}$
If the acceleration produced is in the X-axis, having components $a_x, a_y, a_z$ along the X-axis, Y-axis, and Z-axis respectively, then
$ \displaystyle \begin{array}{l}\vec{a}=({{a}_{x}}\hat{i}+{{a}_{y}}\hat{j}+{{a}_{z}}\hat{k})\text{ }…\text{ (5)}\\\vec{F}=m\vec{a}=m({{a}_{x}}\hat{i}+{{a}_{y}}\hat{j}+{{a}_{z}}\hat{k})\text{ }…\text{ (6)}\end{array}$
If $ \vec{F}_x, \vec{F}_y, \vec{F}_z $ are the components of $\vec{F}$ along the X, Y, Z axes respectively, then
$ \displaystyle \vec{F}={{{\vec{F}}}_{x}}\hat{i}+{{{\vec{F}}}_{y}}\hat{j}+{{{\vec{F}}}_{z}}\hat{k}\text{ }…\text{ (7)}$
Comparing (6) and (7)
$ \displaystyle {{{\vec{F}}}_{x}}=m{{a}_{x}},\quad {{{\vec{F}}}_{y}}=m{{a}_{y}},\quad {{{\vec{F}}}_{z}}=m{{a}_{z}}\text{ }…\text{ (8)}$
As acceleration is a vector quantity and so is force, therefore $ \vec{F} $ being the product of $m$ and $ \vec{a} $, is a vector.
The direction of $ \vec{F} $ is the same as the direction of $ \vec{a} $.
Note that the acceleration component along a given axis can be calculated by taking the force components along the same axis, and dividing it by the mass of the body.
Equation (4) represents the equation of motion of a body.
We can rewrite equation (4) in scalar form as
$ F = m a $
Thus the magnitude of force can be calculated by multiplying mass of the body with the acceleration produced in it. Hence, the second law of motion gives us a measure of force.
Dimensions and Units of Force
As $ F = ma $
$ \displaystyle \therefore F=[M][L{{T}^{{-2}}}]=[{{M}^{1}}{{L}^{1}}{{T}^{{-2}}}]$
This is the dimensional formula of force.
The units of force are of two types: Absolute units and Gravitational units.
(i) Absolute units
(a) The absolute unit of force on SI is newton (represented by N).
One newton force is that much force which produces an acceleration of $ 1 m s^{-2} $ in a body of mass 1 kg.
$\displaystyle \begin{array}{l}\text{As }F=ma\\\therefore 1N=1\text{ kg}\times 1\text{ m}{{\text{s}}^{{\text{-2}}}}=1\text{ kgm}{{\text{s}}^{{\text{-2}}}}\end{array}$
(b) The absolute unit of force on c.g.s. system is dyne.
One dyne force is that much force which produces an acceleration of $ 1 cm s^{-2} $ in a body of mass one gram.
$ \displaystyle \begin{array}{l}\text{As }F=ma\\\therefore 1\text{ dyne}=1\text{ g}\times 1\text{ cm }{{\text{s}}^{{\text{-2}}}}=1\text{ g cm }{{\text{s}}^{{\text{-2}}}}\end{array}$
Relation between newton and dyne
$ \displaystyle \begin{array}{l}\text{As }1\text{N}=1\text{ kg}\times 1\text{ m}{{\text{s}}^{{\text{-2}}}}\\={{10}^{3}}\text{g}\times {{10}^{2}}\text{ cm }{{\text{s}}^{{-2}}}\\\therefore 1\text{N}={{10}^{5}}\text{dyne}\end{array}$
(ii) Gravitational units
(a) The gravitational unit of force on SI is 1 kilogram-weight (kg wt.), or 1 kilopond force (kg f). It is that much force which produces an acceleration of $ \displaystyle 9.8\text{ }\!\!~\!\!\text{ m}{{\text{s}}^{{-2}}}$ in a body of mass 1 kg.
$ \displaystyle 1\text{ kg wt}\text{. or }1\text{ kg f}$ $ \displaystyle =1\text{ kg}\times 9.8\text{ m}{{\text{s}}^{{-2}}}$ $ \displaystyle =9.8\text{N}$
(b) The gravitational unit of force on c.g.s. system is 1 gram weight (g wt.) or 1 gram force (gf). It is that much force which produces an acceleration of $ \displaystyle 980\text{ cm }{{\text{s}}^{{-2}}}$ in a body of mass 1 gram.
$ \displaystyle 1\text{ g wt}\text{.}=1\text{ g f}$ $ \displaystyle =1\text{ g}\times 980\text{ cm }{{\text{s}}^{{-2}}}$ $ \displaystyle =980\text{ dyne}$
Consequences of Newton’s Second Law of Motion
The following are the direct consequences of Newton’s second law of motion:
1. Concept of inertial mass.
From Newton’s second law of motion, it follows that
$ a = \dfrac{F}{M} $
i.e., the magnitude of the acceleration produced by a given force is inversely proportional to the mass of the body. More is the mass of the body, lesser will be the acceleration produced. Thus, the mass of the body is the measure of the resistance offered by the body to the change in velocity which the applied force tends to produce i.e., mass of a body is the measure of its inertia. For this reason, mass given by the above equation (Newton’s second law of motion) is called inertial mass.
2. An accelerated motion is always due to a force.
The accelerated motion of a body can occur in the following three ways:
(a) Due to change in its speed only. The force must be acting on the body along the direction of motion or opposite to the direction of motion.
(b) Due to change in direction of motion only. The force must be acting perpendicular to the direction of motion of the body. Such a force makes the body move along a circular path and is called centripetal force.
(c) Due to change in both speed and direction of motion. The force must be acting obliquely i.e., at some angle with the direction of motion. The component of force along the direction of motion produces a change in speed, while that along the normal produces a change in direction.
3. The measurement of applied force.
According to Newton’s second law of motion,
$$ F = M \cdot a $$
If the inertial mass of the body is known, then by measuring the acceleration produced, the magnitude of the force applied can be determined.
Suppose that the velocity of the body changes by $\Delta v$, when force $F$ acts on the body for a small time $\Delta t$. Then, acceleration is given by:
$$ a = \frac{\Delta v}{\Delta t} $$
and therefore the applied force is given by
$$ F = M \cdot \frac{\Delta v}{\Delta t} $$
If the inertial mass of the body is known, then by measuring the change in velocity produced and the time for which the force acts on the body, the magnitude of the force can be found.
4. The acceleration produced by a force in the motion of a body depends only upon its mass.
The value of the acceleration produced by a force acting on a body does not depend upon the velocity it had in the past or upon its present velocity. It depends only upon the mass of the body.
5. The applied force can be measured from the force law applicable to the mechanism.
In an accelerated motion, the applied force can be measured from the knowledge of the force law applicable in that mechanism.
For example, consider a body attached to a spring. If we pull the spring with some force, the body attached to the spring will move with some acceleration and the length of the spring will also increase. In this mechanism, the fact that the increase in length of the spring is directly proportional to the force applied is the ‘force law’.
Suppose that $ \displaystyle \Delta {{l}_{\circ }}$ is increase in lenght of the spring, when tha body attached to the spring is pulled with a force of 1N. If the body is pulled with an unknown force F, due to which the length of the spring increases by $ \displaystyle \Delta l$, then the force applied (in N) is given by
$ \displaystyle F=\dfrac{{\Delta l}}{{\Delta {{l}_{\circ }}}}$
A spring balance used to measure the weight of a body is based on this principle.
6. The slope of momentum ($ \displaystyle p$) versus time ($ \displaystyle t$) curve gives us the force, i.e.
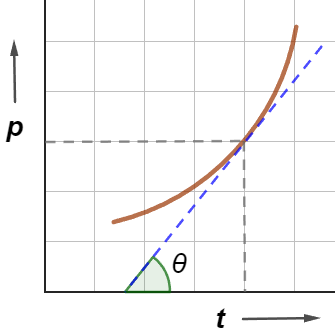
$ \displaystyle \text{Slope of }p-t\text{ curve }=\dfrac{{dp}}{{dt}}=F$





