When we perform work on the spring, whether by compressing or stretching it, this energy is stored within the spring as elastic potential energy. Therefore, the potential energy of a spring is tied to how much it is compressed or expanded.
There are various types of springs, but two that stand out are helical springs and spiral springs as shown in the figure.
In most cases, we assume springs don’t have any mass. Thus, the restoring force due to the spring’s elasticity is evenly spread throughout.
To create compression or extension in a spring, two opposing forces of equal magnitude need to be applied. In the state of equilibrium, the spring generates a restoring force due to its elasticity, which always works in the opposite direction of the applied force.
For a clearer understanding, let’s consider an elastic spring, OA, where one end, O, is fixed to a solid support, and the other end is attached to a mass $m$. The spring is aligned along the x-axis, and the mass lies on a smooth, frictionless horizontal surface, as depicted in the figure below.
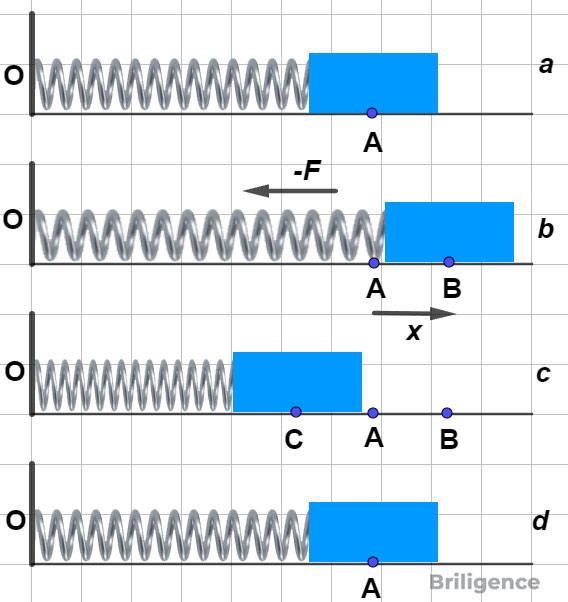
The spring’s relaxed state, when no forces are applied, is marked by point A, which is chosen as the origin.
If the spring is either compressed or stretched, it strives to return to its initial position due to its elastic properties. The force that pulls the spring back to its starting point is called the restoring force.
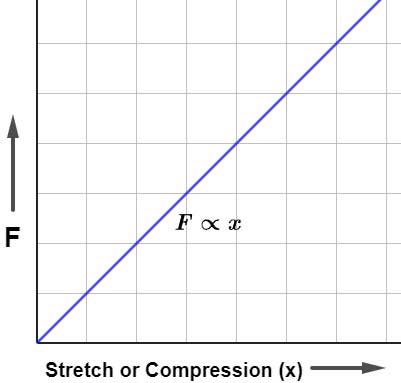
When small amounts of compression or extension occur, the spring behaves in line with Hooke’s Law, meaning:
$$ F \propto x $$
The restoring force is directly related to the amount of compression or extension. In equation form:
$$ F = -kx \quad \text{(1)} $$
Where $k$ stands for the spring constant, which defines the stiffness of the spring.
From equation (1), we can conclude that the greater the stretch or compression, the larger the restoring force will be. This is illustrated in the figure below, where the force ($F$) increases proportionally to the displacement ($x$).
Spring Constant or Force Constant
Using equation (1), we can express the spring constant as:
$$ k = – \dfrac{F}{x} $$
This indicates that the spring constant corresponds to the slope of a force versus displacement graph. Its units are in Newtons per meter (N/m), and the dimensional formula is $\left[ \text{MT}^{-2} \right]$. A spring with a higher $k$ value will be more resistant to stretching or compression, while a lower value means the spring is easier to deform.
In simpler terms, a spring with a greater force constant will be harder to stretch, while one with a lower force constant will be easier to compress.
For example, if $x = 1$, then:
$$ F = -k \times 1 $$
or:
$$ k = -F $$
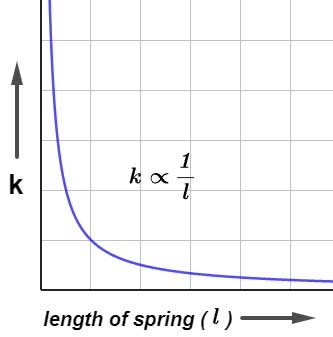
Thus, the force constant of the spring is the force needed to achieve a unit displacement. The value of $k$ depends on the spring’s length ($l$), its radius ($R$), and the material used to construct it.
Additionally, it’s found that the spring constant is inversely proportional to the spring’s length:
$$ k \propto \dfrac{1}{l} $$
The negative sign in equation (20) implies that the restoring force always points towards the position of equilibrium.
Imagine displacing the body a tiny bit more, by an infinitesimally small distance \( dx \), working against the restoring force. The minor amount of work done to extend the spring by \( dx \) can be represented as:
$$ dW = – F dx = kx \, dx \quad \text{(2)} $$
To compute the total work required to displace the body by \( x \), integrate equation (2) from \( x = 0 \) to \( x = x \):
$$ W = \int_0^x kx \, dx = \frac{k}{2} \left[x^2\right]_0^x = \frac{1}{2} k x^2 $$
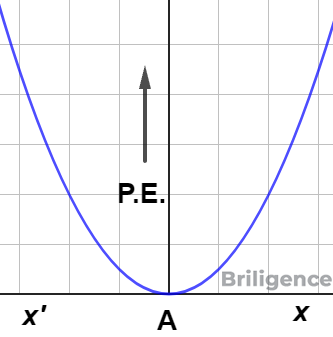
This quantity of work is converted into potential energy stored within the spring at position B:
$$ \text{PE at B} = W = \frac{1}{2} k x^2 \quad \text{(3)} $$
The variation in potential energy as a function of displacement \( x \) is depicted in the figure below.
Alternative Method:
The potential energy formula for a spring can also be derived through graphical methods. The relationship between the restoring force (F) and displacement (\( x \)), as long as it remains within elastic limits, is displayed in the figure.
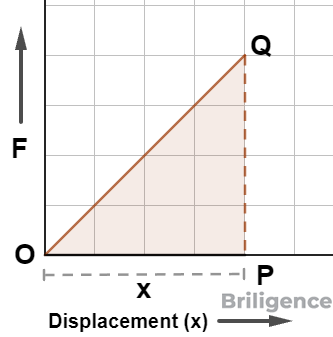
By considering the spring’s potential energy as zero when it is not stretched, the potential energy associated with a displacement \( x \) corresponds to the area of the triangle OPQ:
$$ \begin{array}{l}\text{P}\text{.E}\text{. of spring}=\text{area of}\Delta OPO\\\Rightarrow \text{P}\text{.E}\text{.}=\dfrac{{\text{base}\times \text{height}}}{2}=\dfrac{{x\times F}}{2}\end{array} $$
Given \( F = kx \), this leads to:
P.E. of the spring at B $ \displaystyle =\dfrac{{x\times kx}}{2}=\frac{1}{2}k{{x}^{2}}$
It should be noted that if the block at B is released after stretching the spring, it would return to A due to the stored potential energy.
At point A i.e $ \displaystyle x=0$,
$$ \text{PE of the spring}=\frac{1}{2}k{{x}^{2}}=0 $$
All the potential energy of the spring is then transformed into the kinetic energy of the body at A. Consequently, the body cannot halt at A and moves towards C, where \( AC = -x \). At C, the potential energy of the spring is:
$$ \dfrac{1}{2} k (-x)^2 = \dfrac{1}{2} k x^2 $$
Here at C, the kinetic energy of the body completely converts into the potential energy of the spring, initiating a simple harmonic motion about the equilibrium point A, oscillating between points B and C.
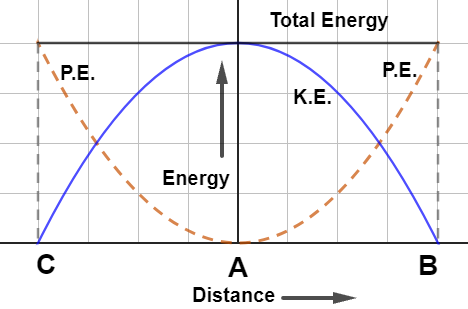
Variations in potential and kinetic energy relative to the distance are shown in below. The total energy, T.E., remains constant across all positions.
In the very first figure, we find that
- When the displacement $ \displaystyle x$ from the equilibrium position is zero, spring force $ \displaystyle F=0$, (first figure a and d)
- For the stretched spring $ \displaystyle x>0$, $ \displaystyle F<0$ (first figure b)
- For the compressed spring $ \displaystyle x<0$, $ \displaystyle F>0$ (first figure c)
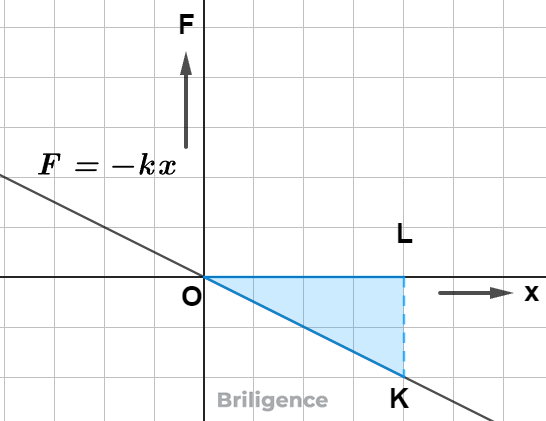
The graphical representation of force and displacement is represented by the figure below. The area of the shaded $ \displaystyle \Delta \text{OKL}$ represents the work done by the spring force. Since, opposing signs of $ \displaystyle F$ and $ \displaystyle x$, this work done is negative.
Remember: the energy associated with state of separation of charged particles that interact electrically is called electric potential energy.
Electric potential energy $ \displaystyle \left( u \right)$ of two point charges $ \displaystyle {{q}_{1}}$ and $ \displaystyle {{q}_{2}}$ by a distance $ \displaystyle r$ in vaccum or air is
$ \displaystyle u=\dfrac{{{{q}_{1}}{{q}_{2}}}}{{4\pi \in {}_{\circ }r}}$
where $ \displaystyle \dfrac{1}{{4\pi \in {}_{\circ }}}=9\times {{10}^{9}}\text{ N}{{\text{m}}^{2}}{{\text{C}}^{{-2}}}$
$ \displaystyle {\in {}_{\circ }}$ is called absolute electrical permittivity of free space (vacuum or air)





