Torque is defined as the turning effect of a force about the axis of rotation. It is also called the moment of force and is measured as the product of the magnitude of the force and the perpendicular distance of the line of action of the force from the axis of rotation. It is denoted by the Greek letter $\boldsymbol {\displaystyle \tau} $.
When we switch on the fan, the center of the fan remains unmoved while the fan rotates with an angular acceleration. As the center of mass of the fan remains at rest, the vector sum of external forces acting on the fan must be zero. It means angular acceleration can be produced even when the resultant force is zero. However, if the resultant force is zero then what is responsible for the angular acceleration?
It is the torque or moment of the force about the axis of rotation which produces angular acceleration.
Torque Formula
Since torque is measured as the product of the magnitude of the force and perpendicular distance of the line of action of force from the axis of rotation.
Therefore,
torque = force × perpendicular distance from the axis of rotation
or
Moment of force = force × perpendicular distance from the axis of rotation
$\bbox[15px, #e4e4e4, border: 2px solid #000000]{\boldsymbol {\displaystyle \tau =rF\sin \theta}} $
$\bbox[15px, #e4e4e4, border: 2px solid #000000]{\boldsymbol {\displaystyle \overrightarrow{\tau }=\overrightarrow{r}\times \overrightarrow{F}}}$
where $\displaystyle \theta $ is the smaller angle between $\displaystyle \overrightarrow{r}$ and $\displaystyle \overrightarrow{F}$. The direction of $\boldsymbol {\displaystyle \overrightarrow{\tau }}$ is perpendicular to the plane containing $\displaystyle \overrightarrow{r}$ and $\displaystyle \overrightarrow{F}$, and is determined by right-hand screw rule.
Explanation
Let us consider a rod OA of length $\displaystyle r$, suspended from O and capable of rotating about O. A force $\displaystyle F$ is applied at the free end A of the road. The angle between $\displaystyle \overrightarrow{r}$ and $\displaystyle \overrightarrow{F}$ is $\displaystyle \theta$ in figure 1.

Therefore, magnitude of moment of force or torque is
$\displaystyle \tau =rF\sin \theta $
$\displaystyle \tau =rF\sin {{0}^{\circ }}=0$
i.e. turning effect of the force in this case is zero.
In figure 2, $\displaystyle \theta ={{90}^{\circ }}$,
$\displaystyle \begin{array}{l}\therefore \tau =rF\sin {{90}^{\circ }}=rF\\\Rightarrow \tau =\text{ maximum}\end{array}$
In figure 3,
$\displaystyle \begin{array}{l}\tau =rF\sin \theta \\\tau =F\left( {r\sin \theta } \right)\\\because {{p}_{1}}=r\sin \theta \\\therefore \tau =F\cdot {{p}_{1}}\end{array}$
The rotation is anticlockwise.
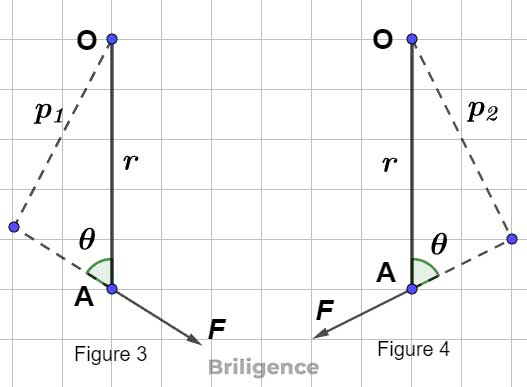
In figure 4,
$\displaystyle \begin{array}{l}\tau =rF\sin \theta \\\tau =F\left( {r\sin \theta } \right)\\\because {{p}_{1}}=r\sin \theta \\\therefore \tau =F\cdot {{p}_{2}}\end{array}$
The rotation is clockwise.
Hence, torque is maximum when $\displaystyle r$ is maximum. For example, we can open or close a door easily by applying force near the edge of the door (at maximum distance from the hinges). That is why a handle/knob is provided near the free edge of the plank of the door.
Similarly, to unscrew a nut fitted tightly to a bolt, we need a wrench with a long arm. When the length of arm ($\displaystyle r$) is long, the force ($\displaystyle F$) required to produce the torque is smaller.
Unit and Dimensional Formula of Torque
The S.I. unit of torque is N-m also called Newton-meter, which is equivalent to joule. Therefore, Newton-meter is the unit of torque. The dimensional formula of torque is $\displaystyle [{{M}^{1}}{{L}^{2}}{{T}^{{-2}}}]$.
Power Associated with Torque
The power associated with torque is given by the product of torque and angular speed of the body about the axis of rotation i.e.
$\bbox[15px, #e4e4e4, border: 2px solid #000000]{\boldsymbol {\displaystyle P=\tau \omega}} $
Let a particle at point P reach Q in a circular path with axis of rotation at O. The small amount of work done in rotating the particle from P to Q is

$\displaystyle \begin{array}{l}dW=F.ds\\\Rightarrow dW=Frd\theta \end{array}$
$\displaystyle \begin{array}{l}\because \tau =rF\\\therefore dW=\tau d\theta \end{array}$
If this work is done in a small time interval $\displaystyle dt$, then
$\displaystyle \frac{{dW}}{{dt}}=\tau \frac{{d\theta }}{{dt}}$
Now, by definition power is the rate of doing the work with respect to time i.e. $\displaystyle \frac{{dW}}{{dt}}=P$ and $\displaystyle \frac{{d\theta }}{{dt}}=\omega $. Therefore, power associated with torque is given by
$\bbox[15px, #e4e4e4, border: 2px solid #000000]{\boldsymbol {\displaystyle P=\tau \omega}} $
Torque and Newton’s Second Law
Consider a simple rigid body, free to rotate about an axis through O, consists of a particle of mass m fastened to the end of a rod of length $\displaystyle r$ and negligible mass. An applied force $\displaystyle F$ causes body to rotate.

The particle has a tangential component of acceleration $\displaystyle {{a}_{t}}$ governed by Newton’s second law:
$\displaystyle {{F}_{t}}=m{{a}_{t}}$
The torque acting on the particle is
$ \displaystyle \tau ={{F}_{t}}r=m{{a}_{t}}r$
Since, $\displaystyle {{a}_{t}}=\alpha r$, where $\displaystyle \alpha $ is the angular acceleration, therefore
$\displaystyle \tau =m\left( {\alpha r} \right)r=\left( {m{{r}^{2}}} \right)\alpha $
the value $\displaystyle {m{{r}^{2}}}$ is known as rotational inertia denoted by $\displaystyle I$, therefore
$\bbox[15px, #e4e4e4, border: 2px solid #000000]{\boldsymbol {\displaystyle \tau =I\alpha}} $
Torque and Angular Momentum of a System of Particles
The rate of change of angular momentum of a system of particles about a fixed point is equal to total external torque acting on the system about the same point i.e.
$\bbox[15px, #e4e4e4, border: 2px solid #000000]{\boldsymbol {\displaystyle \frac{{d\overrightarrow{L}\left( {\text{total}} \right)}}{{dt}}={{\overrightarrow{\tau }}_{{ext}}}\left( {\text{total}} \right)}}$
The torque on a system of particles is equal to vector sum of the external torques acting on all the particles of the system i.e.
$\displaystyle {{\overrightarrow{\tau }}_{1}}\left( {\text{ext}\text{.}} \right)$ $\displaystyle ={{\overrightarrow{\tau }}_{1}}\left( {\text{ext}\text{.}} \right)+{{\overrightarrow{\tau }}_{2}}\left( {\text{ext}\text{.}} \right)+\ldots +{{\overrightarrow{\tau }}_{n}}\left( {\text{ext}\text{.}} \right)$
Similarly, total angular momentum of a system of particles about a fixed point (say, the origin O) is equal to vector sum of the angular momentum of all the individual particles of the system about the same point O i.e.
$\displaystyle \overrightarrow{L}\left( {\text{total}} \right)$ $\displaystyle ={{\overrightarrow{L}}_{1}}+{{\overrightarrow{L}}_{2}}+{{\overrightarrow{L}}_{3}}+\ldots +{{\overrightarrow{L}}_{n}}$
As the rate of change of (total) angular momentum of a system can only be due to torques exerted by the extrenal forces on particles therefore,
$\bbox[15px, #e4e4e4, border: 2px solid #000000]{\boldsymbol {\displaystyle \frac{{d\overrightarrow{L}\left( {\text{total}} \right)}}{{dt}}={{\overrightarrow{\tau }}_{{ext}}}\left( {\text{total}} \right)}}$





